トピックスIV 自動運転の実現に向けた警察の取組
(1)自動運転をめぐる最近の動向
近年、国内外の自動車メーカーやIT企業等によって、完全自動運転を視野に入れた技術開発が急速に進められている。我が国において、自動運転の実現は、成長戦略の一環と位置付けられ、その実現に向けた取組が進められているところ、平成29年5月に高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議において策定された「官民ITS構想・ロードマップ2017」では、2020年を目途に市場化が期待される高度自動運転システム(注1)の実現に当たっては、「ドライバーによる運転」を前提とした交通関連法規の見直しが必要であるとされたほか、30年4月には、高度自動運転の実現に向けた「自動運転に係る制度整備大綱」(以下この項において「大綱」という。)がまとめられた。政府は、大綱に基づく制度整備を進めるなどして、自動運転の早期実現を目指している。
注:我が国では、SAE(Society of Automotive Engineers)InternationalのJ3016におけるSAEレベル0(運転者が全ての運転タスクを実施)からSAEレベル5(システムが全ての運転タスクを実施(限定領域(システムが機能するよう設計されている特有の条件)内ではない)し、システムの作動継続が困難な場合であっても、利用者の応答が期待されない)までの6段階の自動運転レベルの定義を採用しており、自動運転システムのうち、SAEレベル3(システムが全ての運転タスクを限定領域内で実施するが、システムの作動継続が困難な場合は、システムの介入要求等に対して、運転者の適切な応答が期待される)以上を「高度自動運転システム」と、SAEレベル4(システムが全ての運転タスクを限定領域内で実施し、システムの作動継続が困難な場合であっても、利用者の応答が期待されない)及びSAEレベル5を「完全自動運転システム」と呼ぶ。
(2)自動運転の実現に向けた警察の取組
自動運転の技術は、我が国の将来における交通事故の削減や渋滞の緩和等を図る上で不可欠なものになると考えられることから、警察としても、その進展を支援すべく積極的に取組を進めている。
① 自動運転システムの実用化に向けた研究開発
警察庁では、信号情報や交通規制情報を提供する技術的方法等、自動運転の実現に必要となる技術について、関係機関・団体等と連携しつつ、検討を進めている。
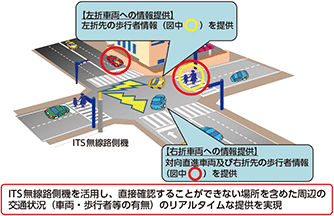
特に、自動運転システムの実用化に当たっては、自動車が信号情報等をリアルタイムに認識し、制御を行う仕組みが必要不可欠となることから、警察庁では、SIP(注1)に基づき、信号情報等を提供する路側システム等の研究開発を実施している。また、警察では、光ビーコン(注2)の機能を活用したシステムの整備(注3)に加え、ITS無線路側機(注4)の活用等について技術的な検討を進めるなど、より安定的かつ高精度の信号情報等の提供に向けた取組を推進している。
注1:Cross-ministerial Strategic Innovation Promotion Program(戦略的イノベーション創造プログラム)の略
注2:通過車両を感知して交通量等を測定するとともに、車載装置と交通管制センターの間のやり取りを媒介する路上設置型の赤外線通信装置
注3:177頁参照
注4:信号制御機や車両感知器等と接続し、設置されている交差点における信号灯火、横断歩行者等の有無といった周辺の交通状況等を、700MHz帯の周波数を利用して広範囲に連続して提供する路上設置型の無線通信装置
② 国際的な議論への参画
我が国が締約しているジュネーブ条約(注1)では、第8条第1項において「一単位として運行されている車両又は連結車両には、それぞれ運転者がいなければならない」と規定されていることなどから、完全自動運転を実現するためには、国際条約との整合性を図るための措置が必要となると考えられる。
近年、自動運転と国際条約との整合性等に関しては、国際連合経済社会理事会の下の欧州経済委員会内陸輸送委員会に置かれたWP1(注2)において議論が行われている。我が国は、平成26年(2014年)9月の第69回会合からオブザーバーとしてWP1に参加していたところ、平成28年(2016年)2月、同委員会において、我が国がWP1の正式メンバーとなることが承認された。また、平成27年(2015年)10月にWP1の下に設置された自動運転に関する非公式専門家グループ(IGEAD(注3))の会合にも発足当初から参加するなどしており、警察庁では、WP1等への参画を通じて、完全自動運転の早期実現を目指し、国際的な議論に取り組んでいる。
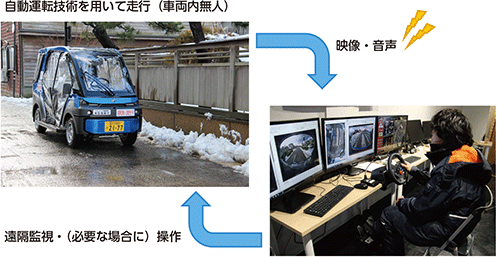
③ 法制度面を含む各種課題の検討
警察庁では、27年10月から、有識者を交えて、自動運転システムの開発等に当たって不可欠な公道における実証実験の実施に伴う課題も含め、自動運転の実現に関する法制度面を含む各種課題について検討を行っており、28年5月には、交通の安全と円滑を図る観点から留意すべき事項等を示す「自動走行システムに関する公道実証実験のためのガイドライン」を、29年6月には、「遠隔型自動運転システムの公道実証実験に係る道路使用許可の申請に対する取扱いの基準」(注4)を、それぞれ策定・公表した。また、29年度には、「技術開発の方向性に即した自動運転の段階的実現に向けた調査検討委員会」を開催し、高度自動運転システムの実用化に向けた道路交通法等の在り方や、複数の車両を電子連結させる技術を活用する隊列走行の実現に向けた各種調査及び検討を行うなど、交通の安全と円滑を確保した上での自動運転の段階的実現に向けた取組を推進した。
大綱に基づき高度自動運転を実用化するためには、交通状況の監視、車両のハンドルの操作等の運転に必要な行為の全てについて、運転者が自ら実施することを前提とした現在の道路交通法の見直しが必要となることから、警察では、自動運転の実現に向け、政府全体のロードマップを踏まえつつ、今後開発される自動運転システムの具体的な性能や使用方法等を把握しながら、同法に関連する課題の検討を更に進めるなど、交通の安全と円滑の確保の観点から必要な取組を引き続き推進することとしている。
注1:昭和24年(1949年)にスイス・ジュネーブにおいて作成された道路交通に関する条約の通称
注2:Global Forum for Road Traffic Safety(道路交通安全グローバルフォーラム)の通称
注3:Informal Group of Experts on Automated Drivingの略
注4:自動車から遠隔に存在する運転者が電気通信技術を利用して当該自動車の運転操作を行うことができる自動運転技術を用いて公道において自動車を走行させる実証実験について、道路使用許可の対象行為とすることとし、全国において実験主体の技術のレベルに応じた実験を、一定の安全性を確保しつつ円滑に実施することを可能とするもの